ホーム > 校長☆副校長
校長☆副校長 Archive
人力AI!?
- 2025-06-11 (水)
- 校長☆副校長
こんにちは、ICTライセンス学科の法華です。
マイクロソフト等が支援していた「Builder.ai」という企業が破産したそうです。
こちらの企業はAIアシスタント「Natasha」を搭載したノーコード開発のサービスを提供していたそうですが、
実はAIに任せていると思われていた作業が、約700人ものインド人エンジニアによる人力作業だったことが発覚しました。
まさに「人力AI」といった感じです。
AIサービスといっても裏側ではどのように動いているかは分かりませんよね。
約700人のエンジニアでAIサービスを再現できる人間がすごいのか、それとも約700人分のエンジニアの仕事ができるAIサービスが凄いのか、
どちらにせよAIサービスというものは使う側は便利だということですね。


- コメント: 0
自然保護センターへ行ってきました
こんにちは。
食品健康科学科の大熊です。
新緑がまぶしい季節となりました。
5/17(金)に、岡山県自然保護センターへ行ってきました。
https://okayama-shizenhogo-c.jp/
自然保護センターでは、多くの植物や動物、虫を観察することが出来ます。
今回は、植物について、ガイドさんに教えてもらいました。
最初に、スズメバチなど野外での注意点について聞きました。
それでは出発。駐車場からセンターの敷地へ移動です。

センターには植物だけで約1,000種類あるとのことで、数の多さにまずびっくりです。

これはエゴノキで、魚毒(サポニン)を含むことから、昔は魚を獲ることに利用していたそうです。
よく似ているスギとヒノキの見分け方も教えてもらいました。
下の写真のAはスギで、Bがヒノキです。葉がとがっているのがスギです。樹皮の見た目も違いますとのことですが、この写真では見分けがつかないですね。(^^;

珍しい植物も見てきました。

ギンリョウソウと言います。植物ですが、光合成をしないので白いです。栄養は共生している他の植物からもらっているそうです。面白い生き方ですね。

松枯れ病のしくみについても教えて頂きました。自然保護センターのあった場所は、以前は赤松がたくさん生えていたとのことです。
タンポポ(花の生態が面白い!)、シダ類から、氷河期遺存植物(氷河期の生き残り植物!)、トキソウなど普段見ることのない植物までいろいろな植物のことを教えていただきました。また共生関係など植物の生態にまつわる興味深いことも教えていただきました。
食品健康科学科では、健康に関連する食べ物、運動、環境について学んでいきます。
今週6/7(土)のオープンキャンパスは、運動に関するメニューです。
健康を科学的に体験してみましょう!
- コメント: 0
国際情報学科に”白い革命” ~黒板からホワイトボードへ!~
- 2025-05-31 (土)
- 校長☆副校長
国際情報学科です。
5月23日,国際情報学科1年生のホームルーム教室で,小さくて大きな革命が起きました。
なんと,これまで使っていた黒板がホワイトボードに生まれ変わったのです!
この”黒から白へ”の変身を支えてくれたのは,一級自動車工学研究科2年の頼れる3人の学生,安心院さん・石井さん・井上さん。
黒板のフレームを丁寧に取り外し,ホワイトボード用ラベルを気泡が入らないよう慎重に貼るその姿は,まさにピット作業のプロフェッショナル。作業後の清掃まで手を抜かず,まさに”一級”の技を見せてくれました。
教員も学生も,「書きやすい!」「消しやすい!」と大絶賛。授業での板書もますますスムーズに,そして明快になりました。
情報もアイデアも,これからはこの “白いキャンバス” に自由に広がっていきそうです。
あらためて,一級自動車工学研究科の3名の皆さん,本当にありがとうございました!



- コメント: 0
二級自動車工学科 中間試験
- 2025-05-26 (月)
- 校長☆副校長
こんにちは。二級自動車工学科の中﨑です!
長いゴールデンウィークもあっという間に終わってしまいましたね。連休を楽しんで、心も体もリフレッシュできた方も多いのではないでしょうか?
逆に連休明けで「五月病」にかかってしまった方はいませんか?少し気が緩んでしまって、やる気が出ない,,, なんてこと、実は結構あるんですよね。
私の受け持つ学生たちの様子
さて、私が教えている2年生の学生たちは就職もほぼ内定し、リラックスムード😪漂っています。とはいえ、中には早くも社会人としての自覚が芽生えてきた学生もいて、頼もしい限りです。
それでも、試験が待っている‼
でも、気を抜いている暇はありません!5月下旬には中間試験が待っています。😨試験勉強は時につらいものですが、目標に向かって頑張ることが大切です。「今は ちょっと億劫だなあ」と感じている皆さんも早めに気を引き締めて頑張ってほしいと思います。
目標をもって前進しましょう
皆さんもそれぞれの目標に向かって頑張ってください。青春のひと時を大切にしつつ、時には自分を律することも大事です。ちょっとずつエネルギーを蓄え あとの成長につなげてください。この時期を乗り越えた先にには、きっと充実した日々が待っています。
みなさんの頑張りを応援しています

- コメント: 0
IT企業から内定を獲得!
- 2025-04-23 (水)
- 校長☆副校長
国際情報学科の小野です。
4月15日,当学科の学生が岡山県内のIT企業から就職内定をいただきました。企業側が採用を決めた理由は以下の通りです。
・自ら勉強をする姿勢
・新たなものづくりへの好奇心
・生成AI(ChatGPT)に依存せず,自分の力での取り組み
もちろん本人の努力が大きいですが,同時にその努力をしっかりと見抜き,評価してくださった企業にも感謝の気持ちでいっぱいです。
※本人の要望により,名前・顔写真・企業名は控えています。
- コメント: 0
佐々木さんが最優秀賞を獲得!
こんにちは、教頭の平野です。(一社)岡山県建築士事務所協会が企画する「第20回優秀卒業作品表彰」の専門学校の部最優秀賞に、本校建築工学科2年佐々木琉翔さん(令和7年3月当時)の作品が選ばれました。設計のバランスの良さなどが評価され、見事につかみ取った栄冠。佐々木さんに受賞の感想や作品の概要などを聞きました。

-最優秀賞を受賞した率直な感想をお願いします。
「すごくうれしいです。取れるとは思っていなかったので、自分が選ばれたときは、『えっ、本当⁇』と思いました」
-受賞作品の名称は「建物が造り出す人の歩み」です。コンセプトや特徴を教えてください。
「課題地は、岡山市中心部で、西川緑道公園と市役所筋に挟まれています。市中心部は再開発が進んでいて他地域に比べ自動車の通行量が多い一方で、公園が少ない印象でした。歩いて楽しい、のびのびと過ごせる場所を造ろうと考えました」
-作品を考えるにあたって苦労したり、工夫したりしたのは、どういった点になりますか。
「建物の形状は最も悩みました。いろいろと思考しましたが、しっくりくるものがなく、先生にアドバイスを求めました。そこで、周辺の建物の形も踏まえたらどうだといった意見をいただき、今回の作品のアイデアを思いつきました」
「色遣いは工夫した点の一つです。白色を多く用いたことで落ち着いた雰囲気を醸し出すことができました。また、周辺の建物に白色が少なかったことで目を引く作品となった気がしています」

-カギセンの同級生もいろいろと別の作品を出していました。アイデアを出しあったり、競い合ったりしたことはありましたか。
「課題地は四つあり、違う地域の同級生とは切磋琢磨して、互いに参考にするところもあったと思います。同地域の同級生については、『自分の方がよりいい作品を作る』と、静かに闘志を燃やしていました」
-あらためてですが、この作品にはどんな思いがこもっているのでしょうか。
「気軽にふらっと訪れて、気持ちよく歩いてほしいといったところですね。ただ、まだまだ完璧な作品ではないと思っています。外装にこだわりすぎて、内装などに時間を割けませんでした。次に作品を手掛ける際は、もっと全体のレベルを上げていきたいです」
-実際にこうした建物を造るには、どのような力をつけていく必要がありますか。
「多くの有名な建築物を見て、どういう理由で名を知られるようになったのか、なぜ活用されているのか、逆にデメリットとなっている部分はあるのかといったところを把握し、知見を深めることが大事だと思います。そうすれば、広い視野で作品制作ができると考えています」
-令和7年4月、本校建築工学研究科に進学しました。今後の学生生活の目標を教えてください。
「まずは2級建築士の資格を目指して頑張り、取得できたら、建築積算士の資格取得、卒業制作と進んでいきます。卒業制作は今回の受賞作を上回る作品を完成させたいです」
-今後、入学してくる後輩にアドバイスをお願いします。
「入学したときを振り替えると自分に設計ができるのかという思いがありました。しかし、指導を受ける先生方は一級建築士だったり、建築事務所で実際に働いていた経験を持っていたりするので、安心して何でも聞くことができます。大船に乗ったつもりで、勉強してもらえればと思います」
◇佐々木さんのこぼれ話◇
佐々木さんは、岡山後楽館高校出身。もともと、ものづくりが好きで、進路は大学と専門学校で迷ったそうですが、「専門に行って好きなことに集中して取り組みたい」と、2級建築士の資格取得が目指せる本校を選びました。将来はハウスメーカーへの就職を希望しており、「お客様の要望にしっかりと応え、担当が佐々木さんでよかったと言ってもらえるような設計士になりたい。お客様が満足感を漂わせる笑顔をたくさん見たいです」と話しています。
- コメント: 0
外国出身者では珍しい検査員で活躍 本校OBのデデさん
こんにちは、教頭の平野です。本校二級自動車工学科OBのデデ・スルヤナさん(25)=インドネシア出身=が、ヤマトオートワークス株式会社岡山工場で、外国出身者では珍しい自動車検査員として頑張っているお話をご紹介します。検査員は自動車整備士の最上位資格で、「日本人でも取得が難しい」と言われていますが、デデさんは昨年の試験でなんと一発合格。その後は日々、整備が終わった車が安全に走行できるか確認しています。試験に受かった際の気持ちや現在の仕事内容、今後の抱負などについて聞きました。

-昨年1月の試験で検査員に合格しました。率直な感想を聞かせてください。
「初めて受けた試験で合格したのでとてもうれしかったです。整備関係の法律について覚えることを頑張りました」
-試験は「検査に関する項目」「基礎法令・整備士法令」から出題されました。自信はありましたか。
「勉強を始めた当時は難しいと思っていましたが、自宅で勉強を頑張ったのと、先輩にいろいろと教えてもらったこともあって、自信を持って臨めました」
-勉強はどのようにして行ったのですか。
「仕事に行く前の2時間ほどを使い、過去問をどんどん解きました。あと、時間がある時には会社の工場内を見回して、自動車の構造など試験に関係ありそうなところを確認することもしました」
-検査員になり、仕事内容や待遇はどう変わりましたか。また、仕事に向き合う意識に変化はありましたか。
「整備士の仕事に加えて、整備が完了した自動車の最終チェックとなる『完成検査』を行うようになり、やりがいが増して給与もアップしました。多い日で1日5台ほど検査しています。車の安全の最終的な責任を負うので、集中して仕事に取り組んでいます」
-2021年3月に本校を卒業後、ヤマトオートワークスに就職しました。そのきっかけを教えてください。
「1年生の夏に職場見学をさせてもらった時、小型車から大型車まで幅広く整備でき、車について理解を深めることができると思いました。ヤマトでアルバイトをしていて、会社名を知っていたことも理由の一つです」

-入社後、この春で5年目を迎える職場はどのような雰囲気でしょうか。
「明るく楽しい職場で、分からないことがあれば上司や先輩たちが教えてくれます。入社してよかったです」
-本校の学生時代について聞きます。なぜ二級自動車工学科に進学したのでしょうか。
「もともと父親がインドネシアで自動車整備士をしており、子供のころから車に興味がありました。日本車も多く走っていました。日本に来て岡山外語学院に通っていた際、二級自動車工学科のオープンキャンパスに参加したところ、先生の知識や技術が素晴らしかったので、入学したいと思いました」
-二級自動車工学科ではどんな思い出がありますか。
「勉強は難しかったですが、先生たちが優しく、分からないことを質問するとしっかりと答えてくれました。日本語も上達し、学生時代に日本語能力試験(JLPT)のN1を取得できたのもよかったです」
-現在、ヤマトオートワークスで充実した毎日を送られていると思います。今後の抱負についてはいかがでしょうか。
「完成検査の際、ちゃんとした手順でミスなく終えることを続け、車の安全走行に貢献したいです。ただ、まだまだ覚えることはたくさんあるので、勉強します。一級整備士の資格取得にも興味があります」
-後輩たちへのアドバイスをお願いします。
「検査員になるのは簡単ではありません。会社で整備士主任を1年以上務める必要があり、車の構造や法令など覚えることも多いです。しっかりと勉強することが大事なので、ぜひ頑張ってみてください」

ヤマトオートワークス株式会社岡山工場 金久保博史工場長の話
「検査員の試験は文章の言い回しが難解で、問題を理解しづらい場合があります。その中で一発合格できたのは、とても優秀な証です。デデさんはまじめで日本語も上手。落ち着いた行動力も持ち味で、将来、外国出身者初の工場長になれる力量があると思っています」
こぼれ話
デデさんは一昨年12月、日本で知り合ったインドネシアの女性と結婚されました。現在、6か月の長女と3人で暮らしており、引き続き、日本で頑張っていこうと考えているそうです。また、ヤマトオートワークス岡山工場では、デデさんを含め本校OB計4人が勤務しており、全員で力を合わせ仕事に汗を流しています。自動車検査員の人数は一般社団法人日本自動車整備振興会連合会(JASPA)のまとめによると、令和6年3月時点で約9万9千人です。そのうち外国出身者の人数についてJASPAと国土交通省自動車整備課に問い合わせたところ、そうした統計はないとのことでしたが、同課の方は「感覚的に、なかなかいらっしゃらないと思います」と話されていました。
- コメント: 0
IT競争力の国際ランキング、日本は何位?
- 2025-02-10 (月)
- 校長☆副校長
こんにちは、ICTライセンス学科の法華です。
グローバルノート株式会社が公開している情報にIT競争力の国際ランキングがあります。
様々な統計情報をもとに、各国にポイントを付けてランキングにしたものです。
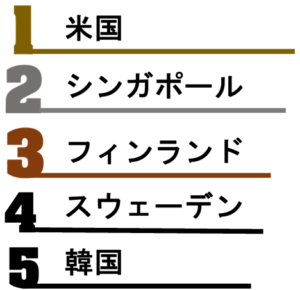
2024年のランキングはどのようになっているのでしょうか、また日本は一体何位なのか見ていきたいと思います。
【出典:https://www.globalnote.jp/post-1523.html】
1位はやはり「米国」となりました。言わずと知れたIT先進国です。近年ではAI分野に力をれて、様々なサービスが開始されています。
2位は「シンガポール」ということでIot分野を政府主導で取り組んでおり、またICT教育にも先進的な取り組みを行っています。
3位は「フィンランド」です。産官学協同を進めていき、IT産業を中核としたサイエンスパークの建設、起業家支援などを進め、競争力を付けてきました。
ということで、様々な国がランクインしていますが、日本は何位なのでしょうか。
日本は12位となっています。書類の電子化や手続きをWebから行えるようにしたり、生成AIを業務導入したりしている企業もあります。
これからさらにIT技術は発展していきます。それと同時にITエンジニアもさらに求められるようになりますので、興味のある方は目指してみても良いかと思います。
- コメント: 0
西日本高速道路ファシリティーズへ入社する池田さんにインタビュー
こんにちは、教頭の平野です。電気通信工学科2年の池田凌平さん(21)が今春、NEXCO西日本グループの「西日本高速道路ファシリティーズ」に入社します。高校卒業後に進学した学校を退学したものの、本校で学び直し、第一級陸上特殊無線技士(一陸技)といった難関資格を取得。希望通り、大手への就職をつかみ取りました。池田さんに、今の気持ちや勉強法、今後の抱負などについて聞きました。
西日本高速道路ファシリティーズに入社する池田凌平さん
-高速道路のメンテナンスを行う西日本高速道路ファシリティーズへの就職が決まりました。率直な気持ちを聞かせてください。
「一陸技を生かせる就職先を探していたところ、仕事内容や待遇面などに魅力を感じ、試験を受けました。『ここに入りたい』と、一筋で考えていたので、合格でき、とても良かったです」
-一陸技をはじめ、多くの資格を取りました。資格に対してはどのような思いを持っていますか。
「資格は就職に生かせるので、頑張って取得すれば自分の将来につながると思っていました。特にうれしかったのはカギセン入学後初めて取った第二種電気工事士ですね。コツコツと続けた勉強が報われた実感がありました」
-資格取得の勉強法についてお聞きします。どのような手法を取りましたか。
「分からないところを放っておかないよう気を付けました。僕は指導してもらっていた三井先生によく質問をしました。計算問題をどう解けばよいのかなどを詳しく、分かりやすく教えていただきました。自宅に帰ってからも勉強する時間を取るよう心掛けました。それほど長い時間でなくても毎日続けることが大事です」
-難関の一陸技についてはどう勉強しましたか。
「過去問を繰り返し解きました。20年分を6回通りは行ったでしょうか。赤字部分で書かれた資料の重要なところを暗記したことも思い出します。ただ懸命に取り組みすぎて熱を出したことがあったので、無理しすぎないのも必要と感じました」
-過去のお話をお聞きします。高校卒業後に進んだ学校を辞めました。どのような理由からでしょうか。
「入学して半年ほどたったころから勉強が遅れはじめ、分からないこところを聞きにくい雰囲気も感じていました。自分には合わなかったと思います」
-その後、カギセンに入学されました。
「オープンキャンパスで電気実習の体験をしたのがきっかけです。配線がうまくできなかったのですが、作業がとても楽しかったことを覚えています」
-資格取得に明け暮れたカギセンでの生活はどうでしたか。
「以前とは違う自分になりました。毎日勉強すれば資格が取れるということが分かり、勉強が好きになって途中から同級生に教えていました。就職も思うようなところに決まって、入学して本当に良かったです」
-今春から社会人生活がスタートします。どう頑張っていこうと思っていますか。
「カギセンで学んだことをしっかりと生かし、分からないことがあったら先輩たちに聞いて、仕事を進めていこうと思います。資格取得も計画しており、電気通信主任技術者に挑戦していきます」
-カギセンの後輩たちに一言お願いします。
「入学したらまず資格を一つ取りましょう。そうすれば自信がつき、次の資格へ意欲がわきます。あとはやはり分からないことをそのままにしておかないことです。先生にどんどん質問して、力を付けてください」
父親・池田泰規さんの話
「凌平はカギセンに入学して勉強に対する意欲が上がったように感じます。以前通っていた学校は理解の度合いにかかわらず先に進んでいくスタイルだったようですが、カギセンは手厚いサポートがありました。私学の良さを出していただいたと思います」
担任からのこぼれ話
三井和一郎先生
「池田さんは飾らない人柄で、『自分は勉強についていけず前の学校を中退した』というようなことを周囲に話しており、初めは同級生に頼られることは少なかったように思います。しかし、授業で何か分からないことがあると、理解できるまで繰り返し質問をしてきました。最初は基礎的な内容が多かったのですが、徐々にレベルアップをしていきました。また自分が知ったことを熱心に周りの学生に教えますので、誰からも信頼されるようになり、池田さんを中心に真剣に資格取得を目指すグループができました」
池田さんの資格取得一覧
| 第二種電気工事士 | 一般用電気工作物(低圧600V以下で受電している電気設備)の工事に従事可能。 |
| 第一種電気工事士 | 第二種電気工事士の範囲に加え、自家用電気工作物(最大電力500キロワット未満)の工場、ビルなどの工事にも従事可能。 |
| 工事担任者第一級デジタル通信 | インターネットやIP電話といった電気通信回線の端末設備の接続工事に携われる。 |
| 第一級陸上特殊無線技士(一陸特) | 主に携帯電話基地局、公共無線(自治体の防災無線、警察、消防無線など)の技術操作を行うための資格。 |
| 第一級陸上無線技術士(一陸技) | 主に陸上の無線局(放送局、電気通信業務用等の固定局、無線測位局など)の無線設備の技術的な操作を行うための資格。一陸特の上位資格。 |
- コメント: 0
岡山西署の110番通報啓発動画に出演!
- 2025-01-20 (月)
- 校長☆副校長
こんにちは、教頭の平野です。110番通報に関する岡山西警察署の啓発動画に、本校国際自動車工学科の学生4人が出演したお話をご紹介します。4人は、ミャンマー出身のテー・モン・ウーさん、カウン・テッ・リャンさん、ネパール出身のパンディ・アニスさん、ケシ・ジバンさん。それぞれの国の言語で、正しい110番通報の仕方などを話しました。
岡山県内でも在留外国人の方は増えており、同県によると令和6年6月においてミャンマー1520人、ネパール1399人で、令和元年12月に比べそれぞれ約4.6倍、約3.2倍となっています。こうした状況を踏まえ、両国の言語を使った、正しい110番通報の仕方など安全啓発動画を作ることになり、勉学に励む留学生のいる本校に出演依頼がありました。
撮影は昨年12月に岡山西警察署署員の方が2人来校し、2回に分けて行われました。まずは6日に「ミャンマー語版」を撮影しました。テー・モン・ウーさん、カウン・テッ・リャンさんは、ともに日本語能力試験(JLPT)のN1を持っているとあって、署員の方とのやり取りはとてもスムーズです。
リハーサルの後、本番に入り、署員の方を含めた計3人で、「110番をしたときは、いつどこで何があったかを教えてください」「その場所が危険な状態でなければ、動かないでください」「間違って110番をしたときは、電話を切らないで『間違った』と教えてください」「電話をかけてきた人が大丈夫かどうか確認しないといけないからです」などと、各自に割り当てられたセリフをリレーして伝えました。

セリフを話すテー・モン・ウーさん(左)。左から3人目はカウン・テッ・リャンさん
11日には「ネパール語版」の撮影があり、パンディ・アニスさん、ケシ・ジバンさんが出演。1回目と同じ内容を、ネパール語で話しました。2人は「少しでも分かりやすく伝えたい」と意欲的で、セリフの言い回しなどを署員の方と話し合って決め、本番に臨んでいました。
撮影に臨むケシ・ジバンさん(中央)とパンディ・アニスさん(右)
動画は完成し、今月から公開されています。ぜひご覧になってください!
「ミャンマー語版」 https://www.youtube.com/watch?v=prf7vLBZeR8
「ネパール語版」 https://www.youtube.com/watch?v=1mc88KelKBQ
撮影が終わった後、4人に話を聞きました。
-どんなことに注意して撮影に臨みましたか⁇
テー・モン・ウーさん 「笑顔でみんなに伝えようと思いました」
カウン・テッ・リャンさん 「実際に相手に伝えているイメージで話しました」
パンディ・アニスさん 「日本にいるネパール人にとって分かりやすい話し方になるよう、気を付けました」
ケシ・ジバンさん 「分かりやすく伝えようと思いました」
-うまく言えましたか⁇
テー・モン・ウーさん 「はい、しっかり言えたと思います」
カウン・テッ・リャンさん 「思ったようにできました」
パンディ・アニスさん 「緊張しましたが、うまく言えました」
ケシ・ジバンさん 「できました。頑張りました」
ちなみに、コンビニエンスストアでアルバイトをしているケシ・ジバンさんは酔ったお客さんが店に入ってきた際、110番通報をしたことがあるそうです…!
4人とも将来は日本で自動車整備士の仕事に就きたいと日々、座学、実習に取り組んでいます。それに加えて社会貢献につながる動画出演、お疲れ様でした!
- コメント: 0
ホーム > 校長☆副校長