- 2023-11-01 (水) 17:56
- 電気通信工学科
こんにちは。電気通信工学科の川本です。今日は、UFOキャッチャー本体の製作途中を紹介いたします。

本体の大きさを決め外枠を製作しています。移動させやすく、動作が見えやすいUFOキャッチャーを目指します。

丸のこ盤でL型のアングルを切断する作業。保護メガネが必要です。

土台となる部分の製作です。常に安定して動作するように、シーちゃん(リップ溝形鋼)を使用しました。

取り出し口の部分を製作しています。品物をゲットしたとき、何か仕掛けができないかなぁー!

実際に品物を掴みにいく駆動部分の動作を確認しています。長手方向をX軸とするとY軸・Z軸の部分になります。
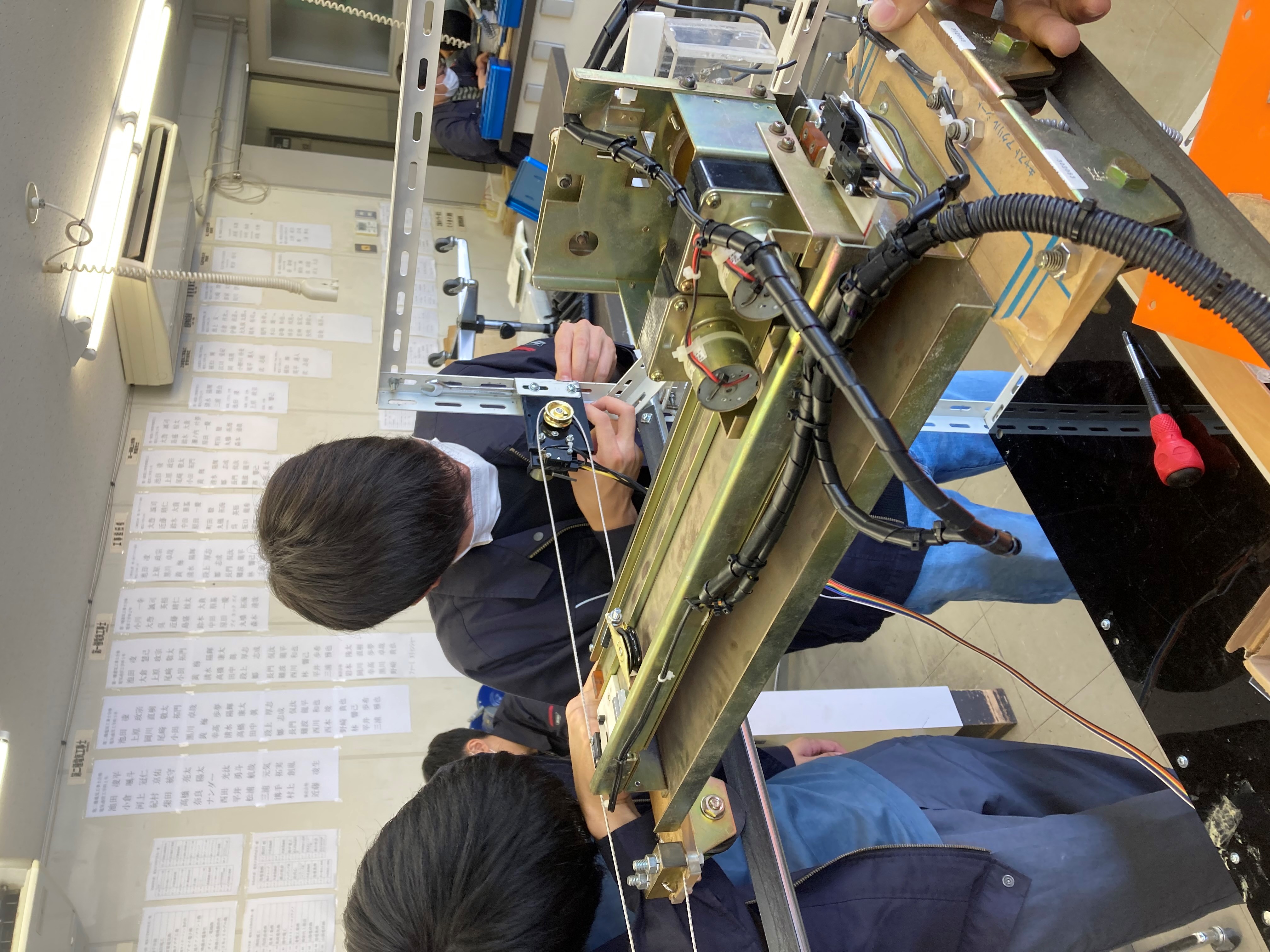
X軸(長手方向、右左に移動する部分)は、モータ軸にプーリー(直径5㎝のリング)を取り付け、ワイヤーによって移動させる仕組みにしました。Y軸(操作盤から奥側・手前側に移動する部分)は、モータ軸にゴム製のリングをはめ、ガイドを移動させる仕組みにしました。Z軸(上下に移動する部分)は、リングにワイヤーが巻き付く仕組みにし、つかみ取るアームが上下に動きます。

X軸は、移動距離が長いのでワイヤーの張りが調整できるように、滑車を取り付けました。各部分にリミットスイッチ(停止や次の動作をさせる)を取り付けました。
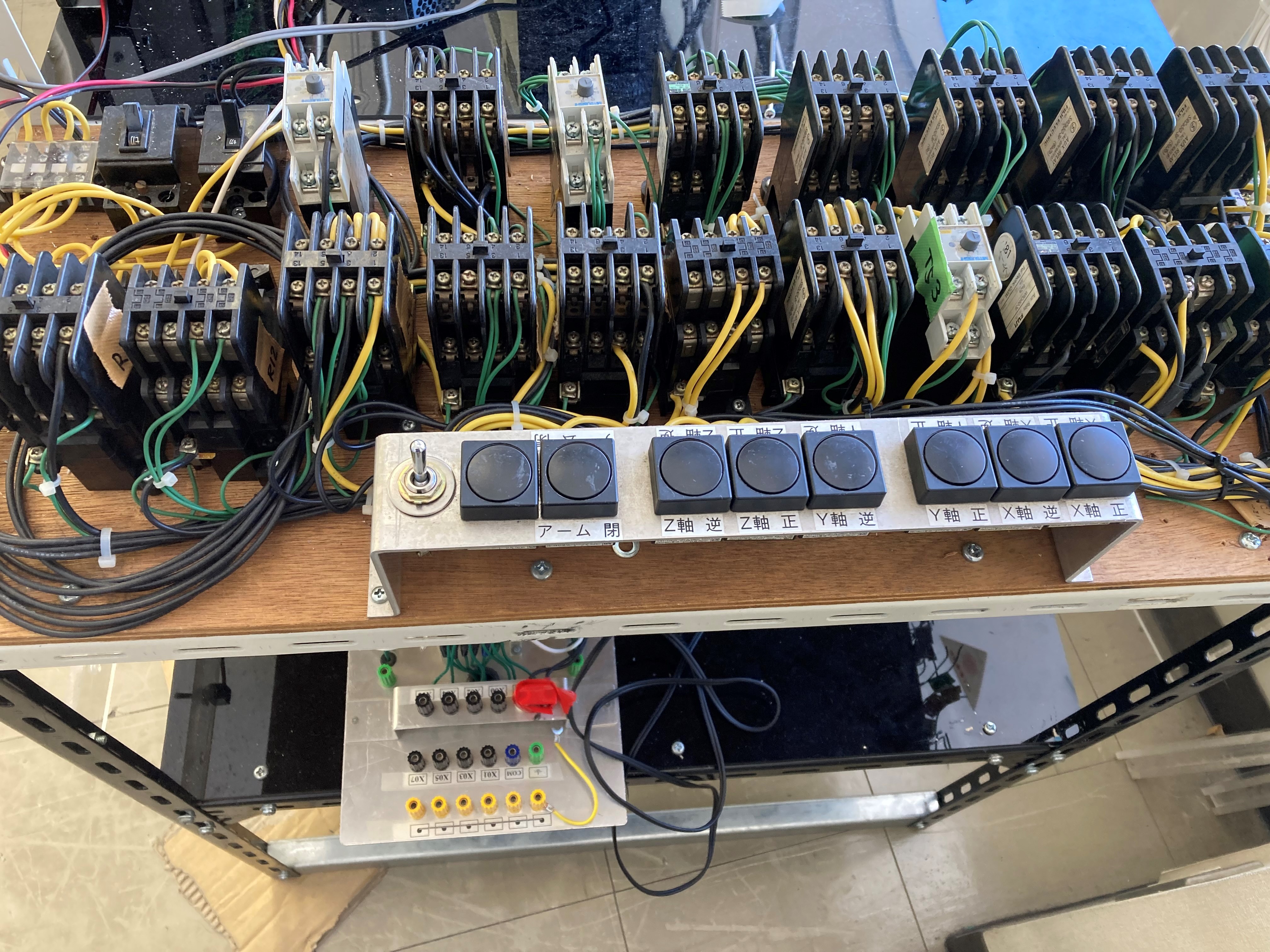
本体・電飾を制御する制御装置です。手動でも自動でも操作ができるように配線しました。
カギフェス2023(学園祭)に来て豪華景品をゲットしてください。
- Newer: 【特別企画!】カギセンで活躍する先生方のご紹介!_part6
- Older: 今年も卒業研究の時期が