Home > アーカイブ > 2020-12-28
2020-12-28
第22回:CANによるECU間通信実験のイメージ
- 2020-12-28 (月)
- 校長☆副校長
こんにちは。宮元です。
再び、EUCに見立てるために購入した2台のワンボードコンピューターです。
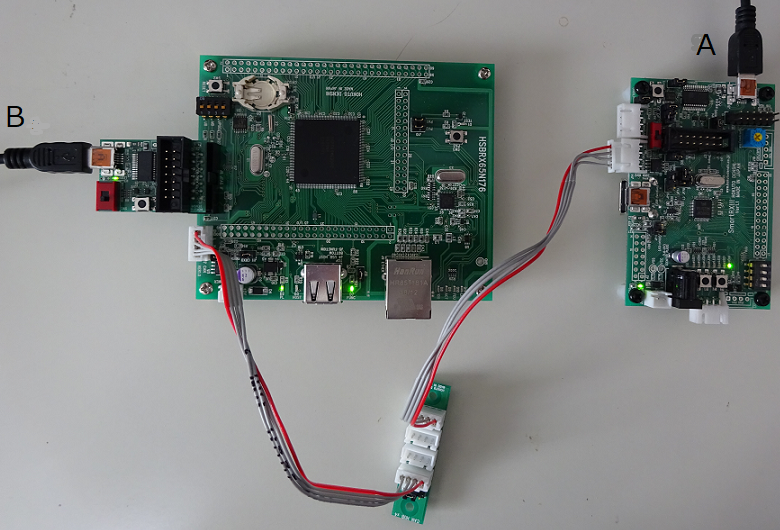
これまでにも言ってきたように、これら1台1台を自動車に搭載されているECUとみなします。今回違うのは、2台のコンピューターをケーブルでつないでいることです。このケーブルを、自動車内のあらゆることころに張り巡らされていると思われる通信ケーブル(「CANバス」といいます)とみなします。残念ながらまだ車内の通信ケーブルは見たことがないので「思われる」と書きました。近い将来、自動車工学科の教員にお願いして見せてもらいます。
ECU間通信実験で使う主要ハードウエアは以上なのですが、これではディスプレイモニターがないので、中で何が起こっているのか確かめようがありません。そこで、写真のAとBの先にそれぞれUSBケーブルでパソコンとつなぎます。それぞれのパソコンでは「ターミナルソフト」と呼ばれるソフトウエアを使ってワンボードコンピューターに命令を出したり、送信データを送ったり、受信したデータを見たりしようというわけです。
とは言いながら、5月のステイホーム以降ずっと、Raspberry Piでのプログラミングにのめり込んでしまって、ECU間通信のほうは置き去りにしていました。ようやく、Raspberry Piプログラミング初級の勉強は終えたかなと感じたので、本来のほうに戻ってきました。
主としてハードウエア周りの準備、プログラム開発のための支援ソフトの準備をして、購入物に付属していたサンプルプログラムが動くところまでは確認できました。これに正味2日ほどかかりました。
このあとは、CANによるECU間通信のアプリケーションプログラムの勉強となるのですが、その前に、CANプロトコルを勉強しなければなりません。これには時間がかかりそうです。ブログ更新の間隔も長くなるかもしれません。
では、年末年始、どうぞ健やかにお過ごしください・・・・
- コメント: 0
Home > アーカイブ > 2020-12-28